多功能集成化太空采矿机器人。
太空采矿?这个曾经只存在于科幻小说和电影中的概念,如今正逐步走向现实。近日,中国矿业大学研发团队发明的全国首台多功能集成化太空采矿机器人目前已经通过初审,即将进入实质审核阶段。这台机器人不仅能适应太空的微重力环境,还配有“仿生六足移动结构”,可以在小行星坑洼不平的地面上行走。
■据《现代快报》
全国首个“星际矿工”诞生
据中国矿业大学机电工程学院华德正博士介绍,刘新华教授研究团队研发了一种全新的多功能集成化太空采矿机器人。这项发明不仅集成了移动、采样抓取、钻探和环境感知等多个模块,还通过创新的设计和材料选择,极大地提高了机器人在复杂太空环境中的适应性和工作效率。
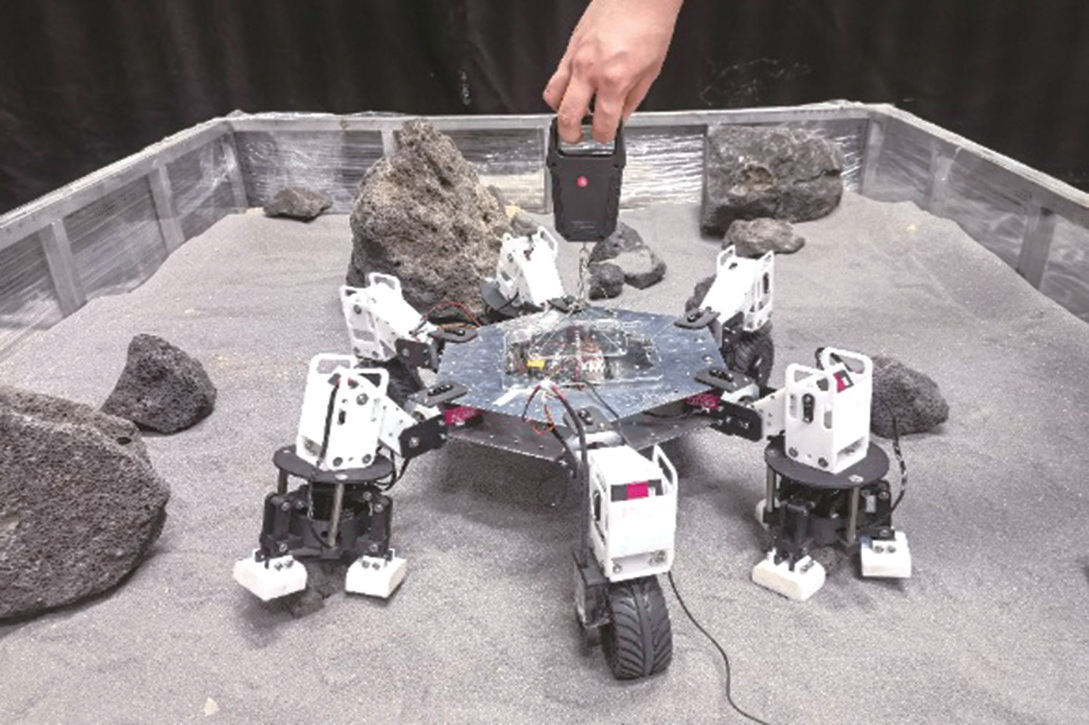
“团队受节肢昆虫、啄木鸟攀附运动和折纸技术的运动机制启发,设计了一种针对小行星复杂环境的移动—锚固—采样一体化仿生机器人。”华德正博士称,多功能集成化太空采矿机器人设计为仿生六足移动结构,足末端有车轮和锚固结构两种配置。车轮主要用来应对相对平滑的小行星地形,可一定程度提高太空采矿机器人的移动速度。锚固结构则主要用来应对存在岩石及松软土壤的复杂地形,并为小行星任务中可能存在的反冲作用提供锚固力,增加工作的可靠性。
材料选择方面,这款太空采矿机器人的主体结构采用了新型铝基碳化硅复合材料,车轮基座采用钛合金材料,车轮轮体则采用镍基钛记忆合金材料。这些材料不仅具有高强度、高韧性和高稳定性的特点,还能在受到外力作用后迅速恢复原状,能有效抵御太空中的极端温差和辐射环境。
更为巧妙的是,该机器人还配备了一套差动系统。通过悬架、离合器、差动器和张角调节器的协同工作,机器人可以根据工作环境调整移动模块的结构形状。无论是崎岖不平的月球表面,还是布满陨石坑的小行星地表,这款机器人都能保持平稳运行,展现出极高的环境适应性。
太空采矿正成为前沿的交叉学科
据了解,太空采矿如今正在成为一门前沿的交叉学科,国内外诸多知名高校都瞄准了太空采矿科研方向。其中,美国科罗拉多矿业学院是全球首个开设太空采矿专业的高校,学生除了要学习传统矿业的知识,还要辅修行星地质学、勘探方法、资源/储量估计和估价的基本知识。国内高校中,除了中国矿业大学设立了太空采矿国际研究中心,还有中南大学、东北大学等高校在从事地外天体资源利用的研究。
根据国家航天局发布的规划,我国将在2028年前后发射嫦娥八号,验证月球资源原位利用技术,为后续国际月球科研站建设奠定基础;2035年前后建成国际月球科研站基本型。太空采矿作为地外天体资源原位利用必不可少的一环,具有巨大的发展潜力。它不仅将为人类解决资源短缺的问题,还将推动人类开启全新的宇宙资源开发时代。
 本期推荐新闻
本期推荐新闻